Autonomous Landing Site Detection
This project was done with the Intelligent Systems Lab during my undergraduate studies at the Technion. Our goal was to contribute to a larger project on autonomous landing in urban environments by developing an efficient approach for identifying safe landing areas from aerial images.
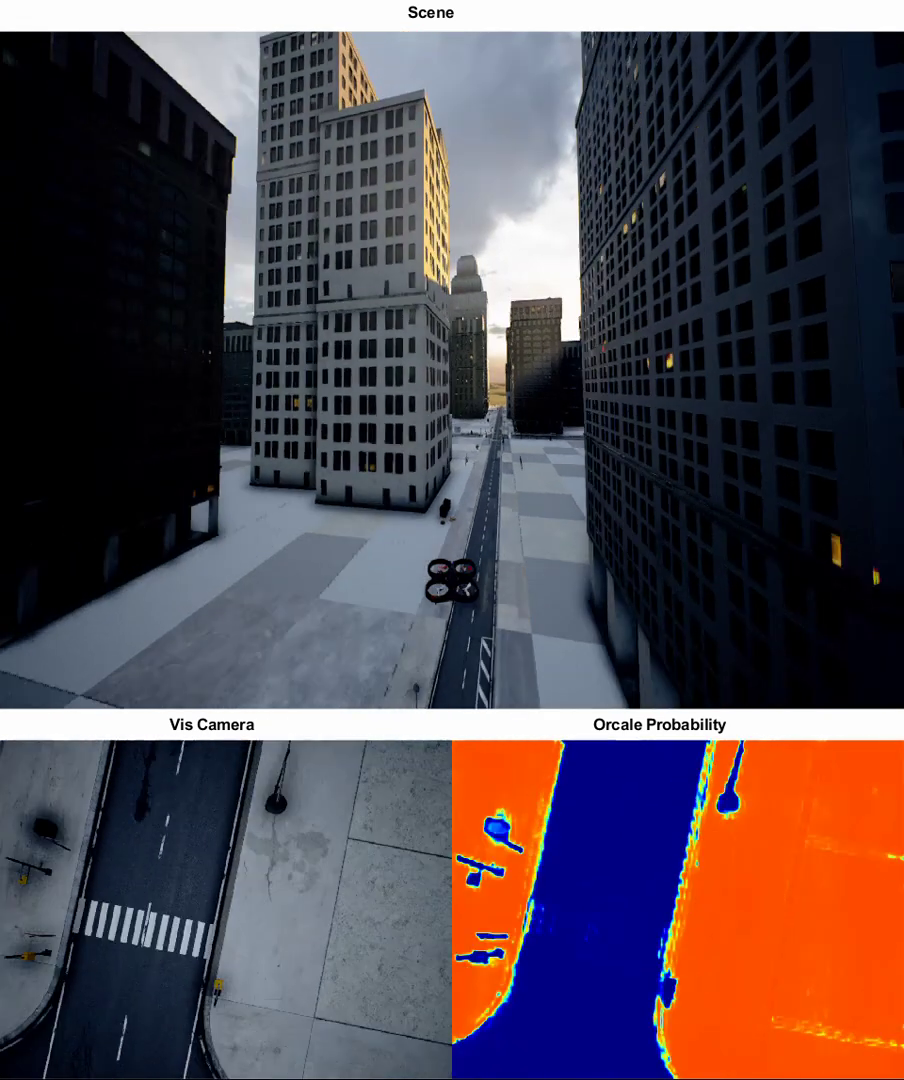
To accomplish this, we used semantic segmentation techniques to extract information from the images and identify zones that were suitable for landing. Our focus was on developing a fast and efficient method that could be used in real-time on a drone.
If you’re interested in learning more, you can check out our full report and slides.